公告
页次: 1
#1 2024-03-25 22:32:59
Gentoo 实现原理 — 进程调度与策略配置
进程调度
进程调度,即 Linux Kernel Scheduler 如何将多个 User Process 调度给 CPU 执行,从而实现多任务执行环境的公平竞争以及合理分配 CPU 资源。
在古早的单核环境中,Linux Scheduler 的主要目的是通过 "时间片轮转算法" 和 “优先级调度算法“ 来实现调度。而在现代多核环境中,Linux Scheduler 则需要考虑更多的复杂因素,如:CPU 负载均衡、Cache 亲和性、多核互斥等。所以本文主要讨论的是多核环境中的进程调度。
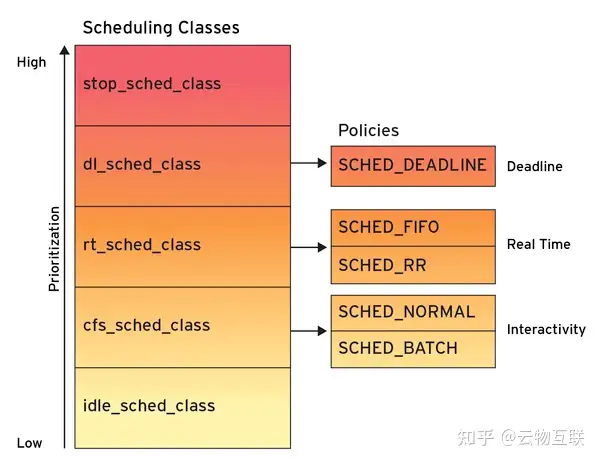
为了应对不同应用场景中的进程调度需求,Linux Kernel 实现了多种 Scheduler 类型,常见的有:
CFS(Completely Fair Scheduler,完全公平调度器)
RT(Real-time Scheduler,实时调度器)
DS(Deadline Scheduler,最后期限调度器)
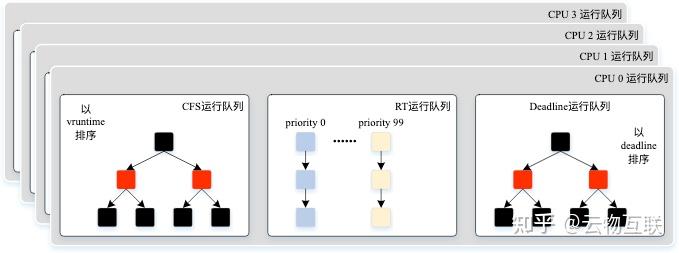
这些 Scheduler 会被作用于每个 CPU Cores 的 “就绪队列“ 中,且具有各自不同的调度算法和优先级策略。
在操作系统层面用户可以操作的只有用户进程实体,所以我们能够看见并使用的大多数调度配置都是针对 User Process 而言。
如下图,Kernel 将进程分为 2 大类型,对应各自的优先级区域以及不同的调度算法。
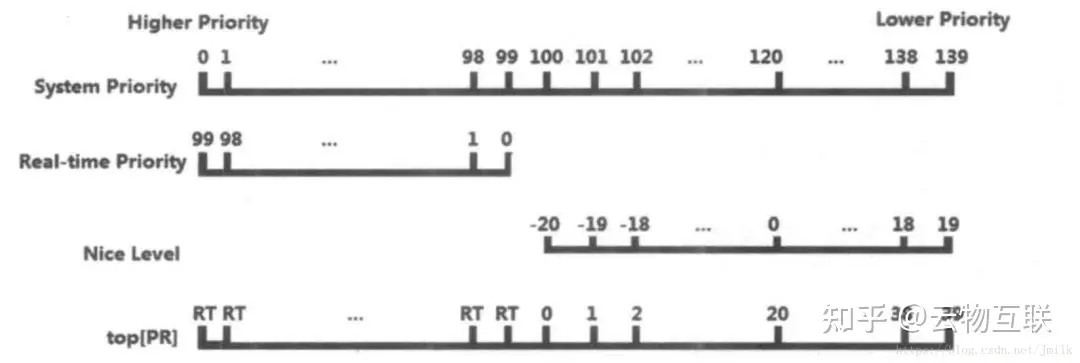
实时进程:具有实时性要求,共有 0~99 这 100 个优先级。
普通进程:没有实时性要求,共有 100~139 这 40 个级别。
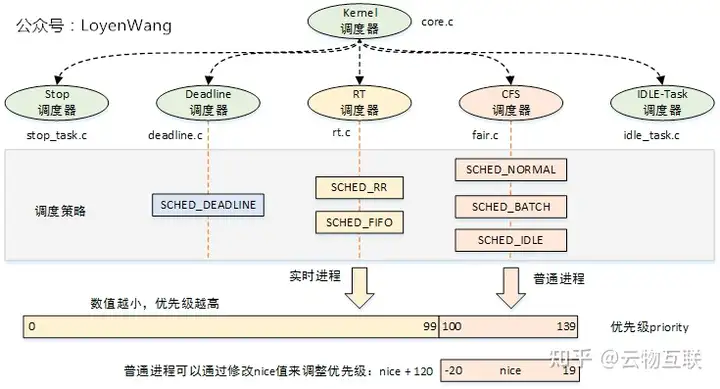
但实际上,实时进程的优先级是初设后不可更改的。也就是说,从系统管理员的角度(Shell)只能配置普通进程的优先级。
针对普通进程的优先级配置,Linux 引入了 Nice level 的设计,Nice 值的范围是 -20~19 刚好对应到普通进程的 40 个优先级。其中,普通用户可以配置的范围是 0~19,而 Root 管理员则可以配置 -20~19。
CFS 完全公平调度器
Linux CFS(Completely Fair Scheduler,完全公平调度器)是 Kernel 默认使用的进程调度器,常用于通用计算场景。
CFS 的 “完全公平“ 并不是简单粗暴的按照 CPU 时间片大小来进行调度,而是会根据进程的运行时间来计算出优先级,运行时间较短的进程会拥有更高的优先级,从而保证了每个进程都能够获得公平的 CPU 时间。
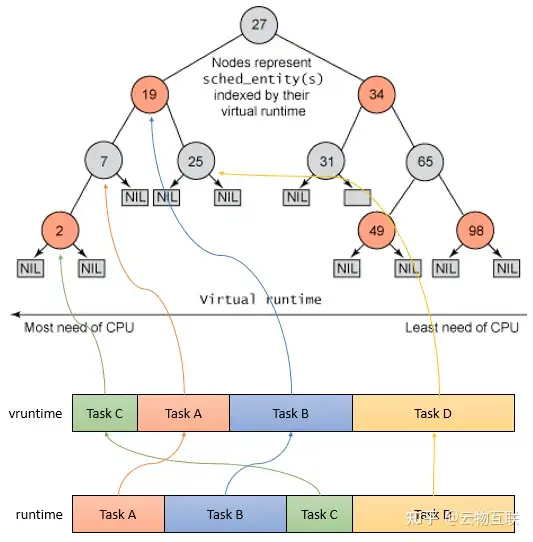
具体而言,CFS 是一种基于红黑树的调度算法,它的目标是让所有进程都可以获得相同的 CPU 时间片。实现原理如下:
CFS 在每个 CPU 上都有一棵红黑树,每个节点对应一个普通进程的 PCB(task_struct)和一个 Key。这个 Key 是进程的一个 VRT(虚拟运行时间),反应了进程在 CPU 上的运行时间。运行时间越长,VRT 就越大,优先级就越小。
当一个新的普通进程被创建时,它会被加入到红黑树中,并且初始的 VRT 值为 0,表示拥有最高调度优先级。
当 CPU 空闲时,就查询红黑树,并将 VRT 最小的就绪进程调度执行,完毕后增加其 VRT,降低其下次调度的优先级。
可见,CFS 的优点让每个进程都获得了公平的 CPU 时间。然而,CFS 的缺点是由于红黑树的操作复杂度较高,对于高并发的场景可能会影响系统的性能。
SCHED_NORMAL(普通进程调度算法)
SCHED_NORMAL 是 CFS 的基本实现,采用了上文中提到的 “时间片轮转“ 和 “动态优先级“ 调度机制。
动态优先级:普通进程具有一个 nice 值来表示其优先级,nice 值越小,进程优先级越高。
时间片轮转:如果有多个普通进程的优先级相同,则采用轮流执行的方式。
SCHED_BATCH(批量调度算法)
SCHED_BATCH 是一种针对 CPU 密集型批处理作业的调度算法。它的主要目的是在系统空闲时间运行一些需要大量 CPU 时间的后台任务。
区别于 SCHED_NORMAL,它并不使用时间片轮转和动态优先级调度机制,而是采用了一种基于进程组的批量处理策略。该算法会将所有的后台任务进程加入到一个进程组中,该进程组会共享一个可调度时间片。
在 SCHED_BATCH 中,进程组会被赋予更高的优先级,以确保后台任务能够在系统空闲时间得到足够的 CPU 时间。
RTS 实时调度器
Linux RTS(Real-Time Scheduler,实时调度器)采用固定优先级调度算法,优先级高的进程会获得更多的 CPU 时间。RTS 是 RT-Kernel 的默认调度算法,常用于对实时性要求高的计算场景。
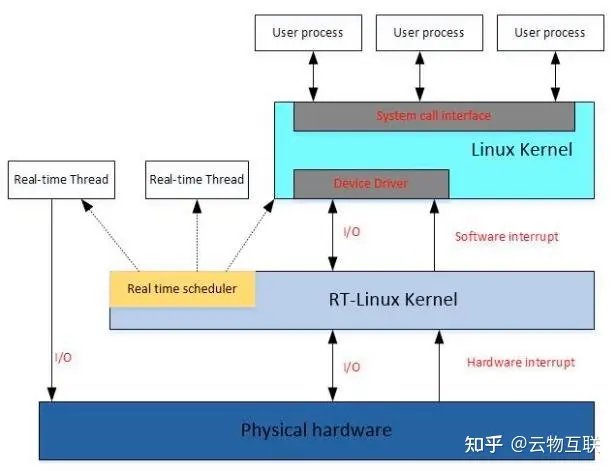
RTS 的主要目的是保证实时任务的响应性和可预测性。固定优先级调度算法,总是可以让高优先级任务先运行,同时还实现了基于抢占的调度策略,以保证实时任务能够在预定的时间内运行完成。实现原理如下:
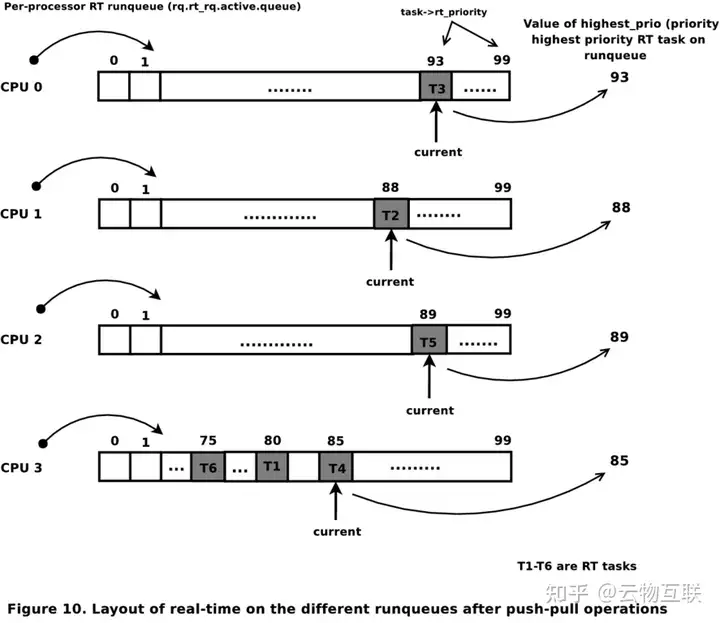
RTS 优先级数值范围从 1(最高)~99(最低),其中 0 保留给 Kernel 使用。
RTS 还实现了基于抢占的调度策略。当一个高优先级的任务到来时,它可以抢占当前正在运行的任务,并且直到运行完毕。
RTS 使用了多队列的方法来管理实时进程。RTS 在每个 CPU 上维护 2 级就绪队列,一个是实时队列,一个是普通队列。并采用了不同的调度算法和优先级策略来进行调度。例如:实时进程采用 SCHED_FIFO 调度算法,普通进程采用 SCHED_RR。
调度器每次选择下一个要运行的进程时,会先从实时队列中选择进程,如果实时队列为空,则从普通队列中选择进程。这样可以保证实时进程的优先级高于普通进程,同时也避免了实时进程长时间等待的情况。
RTS 的优点是能够保证实时任务的响应性和可预测性,但缺点是对于普通任务来说可能会出现长时间等待的情况。
SCHED_FIFO(先到先服务调度算法)
SCHED_FIFO 调度算法会按照进程的提交顺序来分配 CPU 时间,当一个进程获得 CPU 时间后,它会一直运行直到完成或者被更高优先级的进程抢占。因此,该算法可能导致低优先级进程的饥饿情况,因为高优先级进程可能会一直占用 CPU 时间。
SCHED_RR(时间片轮转调度算法)
与 SCHED_FIFO 类似,SCHED_RR 调度算法也会按照进程的提交顺序来分配 CPU 时间。不同之处在于,每个进程都被赋予一个固定的时间片,当时间片用完后,该进程就会被放回就绪队列的尾部,等待下一次调度。该算法可以避免低优先级进程饥饿的问题,因为每个进程都能够获得一定数量的 CPU 时间,而且高优先级进程也不能一直占用 CPU 时间。
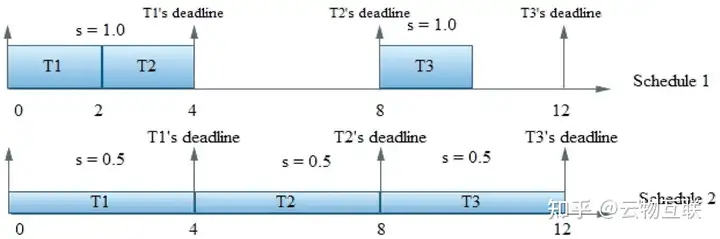
DS 最后期限调度器
Linux DS(Deadline Scheduling,最后期限调度器)是一种基于最后期限(Deadline)的调度器。实现原理如下:
DS 与 CFS 类似的采用了红黑树,但主要区别在于 DS 的树节点 Key 是 Deadline 值,而不是 VRT。
DS 为每个进程赋予一个 Deadline,DS 会按照进程的最后期限的顺序,安排进程的执行顺序。进程的最后期限越近,其优先级就越高。
当 CPU 空闲时,就查询红黑树,并将 Deadline 离与当前时间最近的就绪进程调度执行。
SCHED_DEADLINE(最后期限调度算法)
SCHED_DEADLINE 调度算法是 DS 调度器的默认调度算法,主要用于实时任务的调度。
进程调度策略的配置
ps 指令
我们在配置一个进程的调度策略之前,常常需要使用 ps 指令查看进程的状态信息。
查看进程资源使用信息
$ ps aux
USER PID %CPU %MEM VSZ RSS TTY STAT START TIME COMMAND
root 1 0.1 0.0 78088 9188 ? Ss 04:26 0:03 /sbin/init maybe-ubiquity
...
stack 2152 0.1 0.8 304004 138160 ? S 04:27 0:04 nova-apiuWSGI worker 1
stack 2153 0.1 0.8 304004 138212 ? S 04:27 0:04 nova-apiuWSGI worker 2
...
查看指定进程的 CPU 资源详细使用信息
$ pidstat -p 12285
02:53:02 PM UID PID %usr %system %guest %CPU CPU Command
02:53:02 PM 0 12285 0.00 0.00 0.00 0.00 5 python PID:进程 ID。
%usr:进程在用户态运行所占 CPU 的时间比率。
%system:进程在内核态运行所占 CPU 的时间比率。
%CPU:进程运行所占 CPU 的时间比率。
CPU:进程在哪个核上运行。
Command:创建进程对应的命令。
查看进程优先级信息
$ ps -le
F S UID PID PPID C PRI NI ADDR SZ WCHAN TTY TIME CMD
4 S 0 1 0 0 80 0 - 19522 ep_pol ? 00:00:03 systemd
1 S 0 2 0 0 80 0 - 0 kthrea ? 00:00:00 kthreadd
1 I 0 4 2 0 60 -20 - 0 worker ? 00:00:00 kworker/0:0H
1 I 0 6 2 0 60 -20 - 0 rescue ? 00:00:00 mm_percpu_wq
... UID:进程执行者 ID。
PID:进程 ID。
PPID:父进程 ID。
PRI:进程优先级,值越小优先级越高。
NI:进程的 nice 值。
查看系统中所有的实时进程
$ ps -eo pid,tid,class,rtprio,ni,pri,psr,pcpu,policy,stat,wchan:14,comm |awk '$4 !~ /-/{print $0}'
PID TID CLS RTPRIO NI PRI PSR %CPU POL STAT WCHAN COMMAND
7 7 FF 99 - 139 0 0.0 FF S smpboot_thread migration/0
10 10 FF 99 - 139 0 0.0 FF S smpboot_thread watchdog/0
11 11 FF 99 - 139 1 0.0 FF S smpboot_thread watchdog/1
12 12 FF 99 - 139 1 0.0 FF S smpboot_thread migration/1查看 nice 不为 0 的普通进程
$ ps -eo pid,tid,class,rtprio,ni,pri,psr,pcpu,policy,stat,wchan:14,comm|awk '$4 ~ /-/ &&$5 !~/0/ {print $0}'
63 63 TS - 5 14 2 0.0 TS SN ksm_scan_threa ksmd
64 64 TS - 19 0 2 0.0 TS SN khugepaged khugepaged
12995 12995 TS - -4 23 1 0.0 TS S<sl ep_poll auditd查看进程运行状态及其内核函数名称
$ ps -eo pid,tid,class,rtprio,ni,pri,psr,pcpu,policy,stat,wchan:34,nwchan,pcpu,comm
PID TID CLS RTPRIO NI PRI PSR %CPU POL STAT WCHAN WCHAN %CPU COMMAND
1 1 TS - 0 19 4 0.0 TS Ssl ep_poll ffffff 0.0 systemd
2 2 TS - 0 19 0 0.0 TS S kthreadd b1066 0.0 kthreadd
3 3 TS - 0 19 0 0.0 TS S smpboot_thread_fn b905d 0.0 ksoftirqd/0
...
44 44 TS - 0 19 7 0.0 TS R - - 0.0 kworker/7:0 wchan:显示进程处于休眠状态的内核函数名称,如果进程正在运行则为 -,如果进程具有多线程且 ps 指令未显示,则为 *。
nwchan:显示进程处于休眠状态的内核函数地址,正在运行的任务将在此列中显示短划线 -。
nice 指令
nice 指令用于修改普通进程的 nice 值。
设定即将启动的普通进程的 nice 值
nice -n -5 service httpd start修改已经存在的普通进程的 nice 值
$ ps -le | grep nova-compute
4 S 1000 9301 1 2 80 0 - 530107 ep_pol ? 00:02:50 nova-compute
$ renice -10 9301
9301 (process ID) old priority 0, new priority -10
$ ps -le | grep nova-compute
4 S 1000 9301 1 2 70 -10 - 530107 ep_pol ? 00:02:54 nova-computechrt 指令
chrt 指令可用于修改进程的调度算法和优先级。
$ chrt --help
Show or change the real-time scheduling attributes of a process.
Set policy:
chrt [options] <priority> <command> [<arg>...]
chrt [options] --pid <priority> <pid>
Get policy:
chrt [options] -p <pid>
Policy options:
-b, --batch set policy to SCHED_BATCH
-d, --deadline set policy to SCHED_DEADLINE
-f, --fifo set policy to SCHED_FIFO
-i, --idle set policy to SCHED_IDLE
-o, --other set policy to SCHED_OTHER
-r, --rr set policy to SCHED_RR (default)修改进程的调度算法
$ chrt -r 10 bash
$ chrt -p $$
pid 13360's current scheduling policy: SCHED_RR
pid 13360's current scheduling priority: 10
$ ps -eo pid,tid,class,rtprio,ni,pri,psr,pcpu,policy,stat,wchan:14,comm |awk '$4 !~ /-/{print $0}'
PID TID CLS RTPRIO NI PRI PSR %CPU POL STAT WCHAN COMMAND
13360 13360 RR 10 - 50 7 0.0 RR S do_wait bash修改实时进程的优先级
$ ps -eo pid,tid,class,rtprio,ni,pri,psr,pcpu,policy,stat,wchan:14,comm |awk '$4 !~ /-/{print $0}'
PID TID CLS RTPRIO NI PRI PSR %CPU POL STAT WCHAN COMMAND
27 27 FF 99 - 139 4 0.0 FF S smpboot_thread migration/4
$ chrt -p 31
pid 31's current scheduling policy: SCHED_FIFO
pid 31's current scheduling priority: 99
$ chrt -f -p 50 31
$ chrt -p 31
pid 31's current scheduling policy: SCHED_FIFO
pid 31's current scheduling priority: 50离线
页次: 1